مقایسه موتور آسانسور گیرلس دیسکی و بشکه ایی
امروزه موتورهای الکتریکی 65 درصد مصرف کننده های انرژی در سرتاسر جهان را تشکیل می دهند. با افزایش نگرانی های زیست محیطی طراحی الکتروموتورهایی با راندمان بالا جذابیت بسیاری پیدا کرد درنتیجه اخیراً جاگزینی الکتروموتورهای سنکرون بجای الکتروموتورهای القایی مرسوم، در صنایع بسیار مورد توجه قرار گرفته است.

موتور آسانسور گیرلس چیست؟
این نوع موتورها انواع مختلفی دارند ولی با گسترش تکنولوژی امروزه انواع الکتروموتورهای سنکرون مغناطیس دائم با نام اختصاری PMSM(Permanent Magnet Synchronous Motor) در صنایع آسانسور مورد استفاده قرار می گیرند. استاتور این نوع الکتروموتورها ساختاری شبیه موتوروهای آسنکرون دارند ولی روی روتور این نوع موتورها مگنت هایی طراحی شده است که همواره میدان مغناطیسی یکنواختی ایجاد می کنند، لذا نیاز به سیم پیچی و منبع تغذیه DC برای روتور مرتفع شده است. در نتیجه این نوع الکتروموتورها از ابعاد و هزینه تولید کمتری نسبت به الکتروموتورهای آسنکرون برخوردار هستند.
موتور گیرلس آسانسور PMSM به دو نوع کلی موتورهای سنکرون شعاعی و محوری تقسیم بندی می شوند که در این مقاله به بررسی موتورهای سنکرون شعاعی پرداخته خواهد شد.
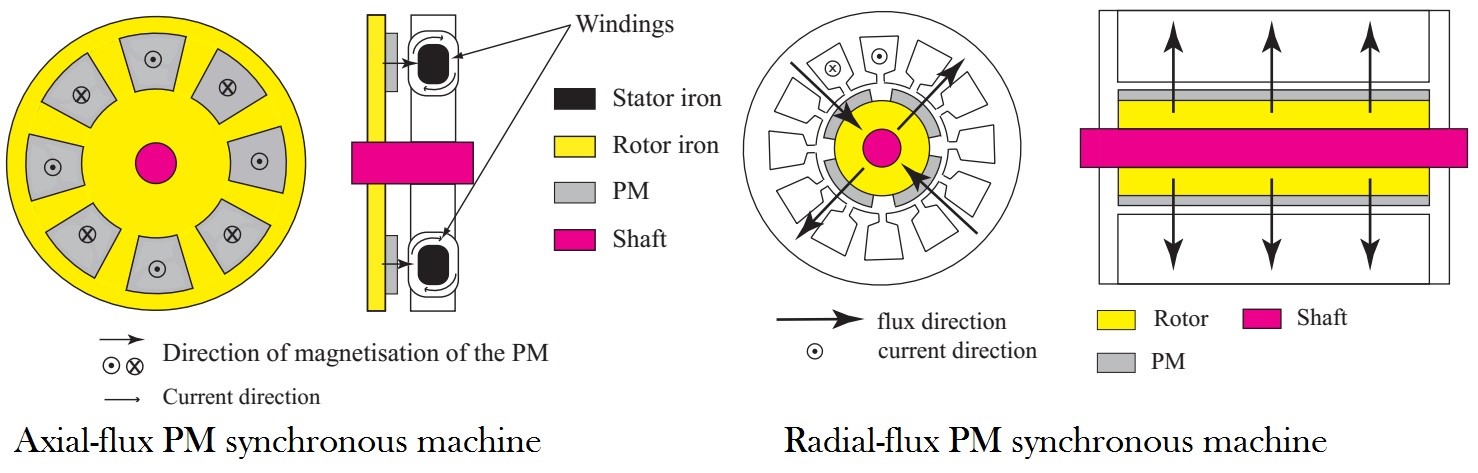
متعارف ترین نوع الکتروموتورهای گیرلس مغناطیس دائم در صنایع آسانسور به دلیل سادگی ساختار و پایین بودن هزینه های تولید، الکتروموتورهای مغناطیس دائم سنکرون شعاعی (RFPM) می باشد.
انواع الکتروموتورهای مغناطیس دائم سنکرون شعاعی (RFPM)
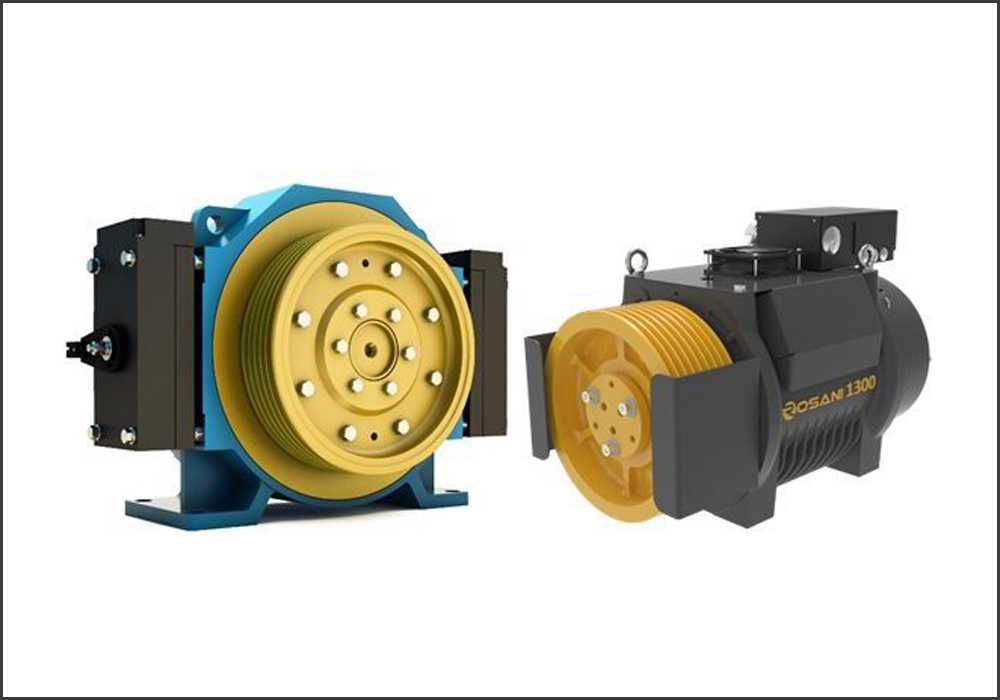
الکتروموتورهای گیرلس RFPM از لحاظ چیدمان مگنت ها روی روتور به انواع مختلفی تقسیم بندی می شوند که دو نوع متعارف آن در صنایع آسانسور الکتروموتورهای گیرلس روتور داخلی و بیرونی می باشند. در حال حاضر در بازار ایران این الکتروموتورها را به ترتیب با نام موتور گیرلس بشکه ایی و موتور گیرلس دیسکی می شناسند.
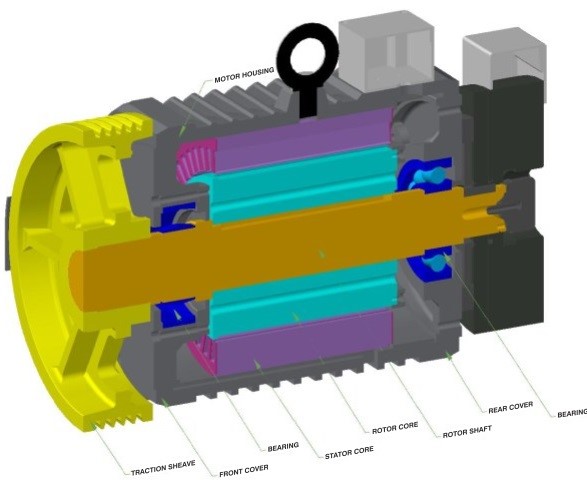
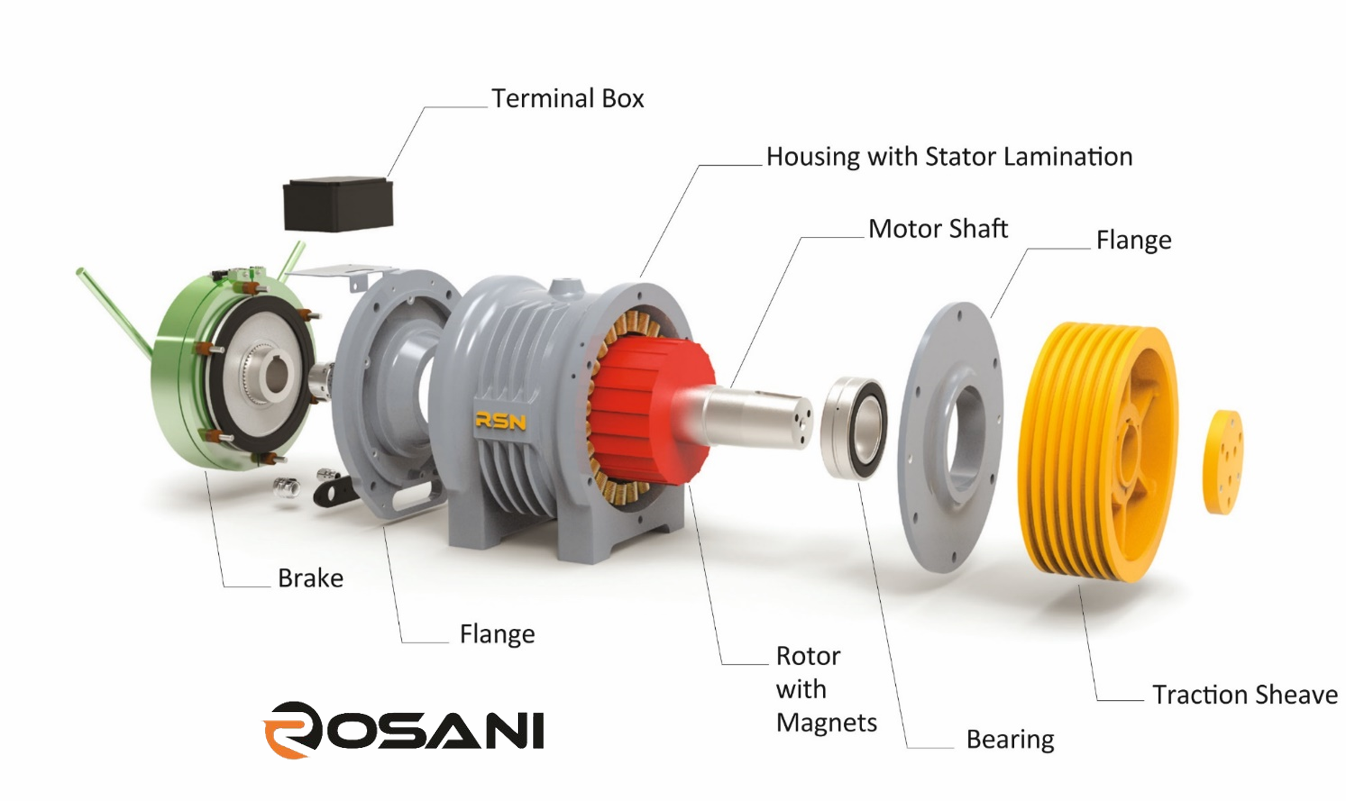
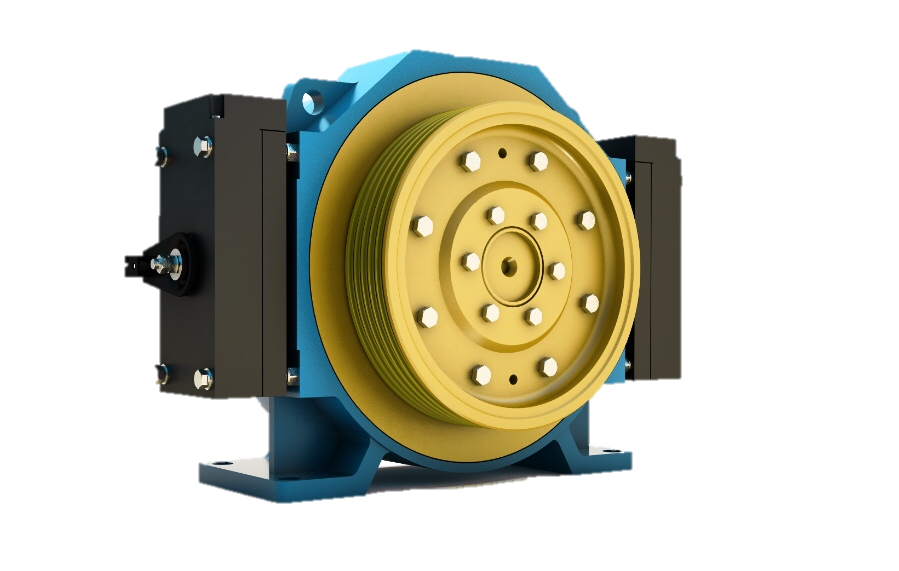
موتور آسانسور گیرلس روتور داخلی (بشکه ایی)
در این نوع موتورهای آسانسور گیرلس، مگنت ها یا به صورت مکانیکی یا با چسب های خاصی روی سطح روتور نصب می شوند که متداول ترین نوع قرار گرفتن مگنت روی روتور همین نوع می باشد. این نوع ساختار از چیدمان مگنت ها به Inset PM مشهور می باشد. در این حالت حد فاصل بین مگنت ها با آهن هسته روتور به صورت برجستگی پر شده است . این برجستگی آهن علاوه بر گشتاور مغناطیسی، گشتاور رلوکتانس هم ایجاد میکند.

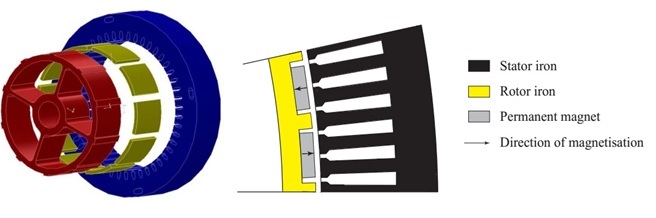
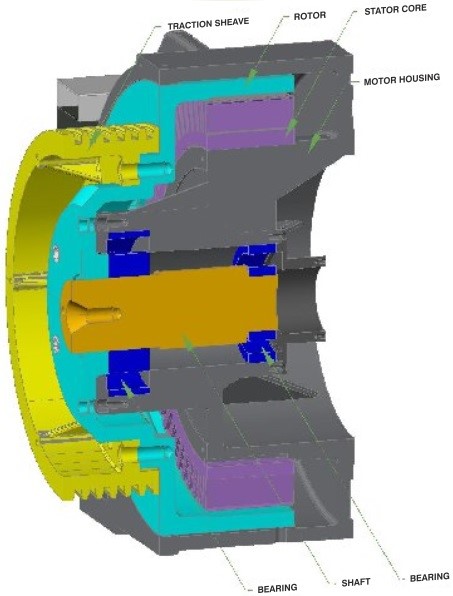
موتور آسانسور گیرلس روتور بیرونی (دیسکی)
طراحی اولین موتور روتور بیرونی توسط Emil Ziehl کارآفرین برتر آلمانی در سال 1897 صورت پذیرفت و سال 1900 میلادی حق امتیاز اصلی آن را به نام خود ثبت کرد.

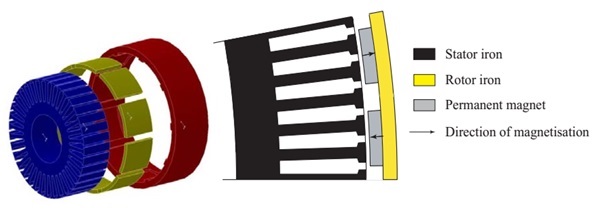
در این نوع الکتروموتورهای آسانسور گیرلس محل قرار گیری معمول استاتور و روتور تغییر یافته است. استاتور که جزء ثابت الکتروموتور است در مرکزموتور و روتور که جزء متحرک الکتروموتور است در بیرون استاتور ( یا درمحیط بیرونی موتور) قرار گرفته است.

مقایسه الکتروموتورهای دیسکی و بشکه ایی
- موتورهای آسانسور گیرلس بشکه ایی با توجه به قانون ” عدم ایجاد سایه موتور روی کابین ” ، با توجه به عرض و ارتفاع کم تر نسبت موتور های گیرلس دیسکی گزینه ای مناسب تر در طراحی آسانسورهای MRL می باشد.
- هر دو گزینه موتورهای آسانسور گیرلس بشکه ایی و موتورهای آسانسور گیرلس دیسکی قابلیت نصب در فضای موتور خانه و چاه آسانسور را دارند.
- در آسانسورهایی که طراحی به گونه ایی می باشد که می بایست موتور در فضای محدود بالاسری کابین نصب شود تنها گزینه انتخاب موتورهای آسانسور بشکه ایی می باشد.
- هر دو نوع موتور آسانسور بشکه ایی و دیسکی از لحاظ کیفیت و نرمی حرکت مشابه هم می باشند و تفاوت قابل مشاهده ایی نسبت به هم ندارند.
- موتورهای آسانسور گیرلس بشکه ایی از لحاظ تحمل بار استاتیکی تنوع محصولات بیشتری نسبت به نوع دیسکی دارند و قابل استفاده در سیستم تعلیق نیز 1:1 می باشند.
- موتورهای آسانسور گیرلس دیسکی با توجه به تماس مستقیم لنت با روتور در صورت استهلاک هزینه بالاتری نسبت به نوع بشکه ایی دارند.
- موتورهای آسانسور گیرلس بشکه ایی با توجه به ساختار استاتور و بلندتر بودن طول موتور ، بدنه ایی مستحکم تر نسبت به نوع دیسکی دارند و از این لحاظ ضریب ایمنی بالاتری دارند به همین علت در بازار در مقایسه با موتور های آسانسور دیسکی متقاضی بیشتری دارند.
- در موتورهای گیرلس بشکه ایی به دلیل طول بیشتر روتور ، هسته استاتور سطح تماس بیشتری با پوسته داشته در نتیجه این نوع الکتروموتور اکثراً نیازی به سیستم خنک کاری ندارند.
- موتورهای آسانسور بشکه ایی در مقایسه با نوع دیسکی از لحاظ قطر فلکه کشش تنوع بیشتری دارند .








دیدگاهتان را بنویسید